AGV��AMRС܇�{(di��o)��ϵ�y(t��ng)�ĽY(ji��)��(g��u)�͌�(du��)��������ϵ�y(t��ng)�Ľ���
TIME:2025/6/9 23:02:40 click: 11 ��
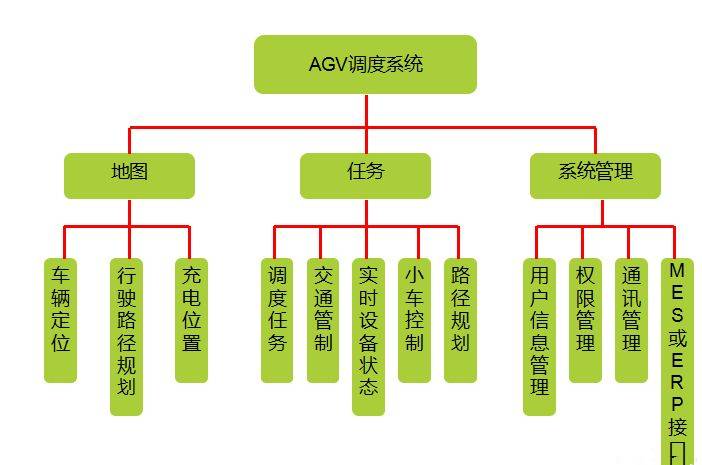
AGV �{(di��o)��ϵ�y(t��ng)������������ ����(j��ng)�ИС�����ܘ�(g��u)�O(sh��)Ӌ(j��)�����`�����c�ɿ��ԣ�ͨ��������ģ�K���O(sh��)Ӌ(j��)���������º��ĽM����
-
���Ķ�λ��ȫ���΄�(w��)Ҏ(gu��)���c�YԴ�f(xi��)�{(di��o)����(du��)���όӘI(y��)��(w��)ϵ�y(t��ng)�������{(di��o)�Ȳ��ԡ�
-
�P(gu��n)�Iģ�K��
-
�΄�(w��)��������������ӆ�Σ��� WMS �ij����(k��)ָ�MES ������������������(y��u)�ȼ�(j��)��·����(y��u)����Ҏ(gu��)�t����΄�(w��)�(du��)�С�
-
�����㷨ģ�K������·��Ҏ(gu��)���㷨������M(j��n) Dijkstra��A * �㷨�����΄�(w��)������ԣ����z���㷨��(y��u)����܇�f(xi��)ͬ������(d��ng)�B(t��i)Ҏ(gu��)�ܓ��²�ƽ���O(sh��)��ؓ(f��)�d��
-
��(sh��)�\���O(ji��n)����ͨ�^ 3D ��ҕ�����挍(sh��)�r(sh��)չʾ AGV λ�á���B(t��i)���\(y��n)�� / ��� / ���ϣ����΄�(w��)�M(j��n)�ȣ�֧�֮����A(y��)����������͡��΄�(w��)���r(sh��)����

-
���Ķ�λ���������ָ���D(zhu��n)���� AGV �Ɉ�(zh��)�еĿ�����̖(h��o)����(sh��)�F(xi��n)��Ⱥ�f(xi��)ͬ�c��(sh��)�r(sh��)�ܿء�
-
�P(gu��n)�Iģ�K��
-
��ͨ����ϵ�y(t��ng)�����څ^(q��)���(qu��n)���������O(sh��)�ý�ֹͨ�Ѕ^(q��)����(y��u)��ͨ��·�����̈́�(d��ng)�B(t��i)�����㷨���������_(d��) + ҕ�X�ںϣ��������܇��ײ�����i��
-
ͨ�žW(w��ng)�P(gu��n)��֧�ֶ��f(xi��)�h�D(zhu��n)�Q���� MQTT��OPC UA��Modbus�������ݲ�ͬ�S�� AGV�c��������RFID�����S�a�x�^����
-
��늹������Y(ji��)������A(y��)�y(c��)�c�΄�(w��)�g϶�������{(di��o)�� AGV ����늘�����늴ŸБ�(y��ng)��늡��Q�վ���������B�m(x��)���I(y��)��
-
-
���Ķ�λ��AGV ���w�������(zh��)���c�Ӕ�(sh��)��(j��)�ɼ���
-
�P(gu��n)�Iģ�K��
-
��(d��o)��ģ�K��֧�ּ��� SLAM��ҕ�X��(d��o)����UWB ����(j��)��λ�ȶ�ģ�B(t��i)��(d��o)�����m��(y��ng)��(f��)�s�h(hu��n)������o���@��(bi��o)�R(sh��)�Ĺ��S܇�g����(d��ng)�B(t��i)�ϵK���(ch��ng)������
-
���I(y��)�C(j��)��(g��u)������(j��)ؓ(f��)�d��ͣ��бP�����䡢؛�ܣ������������ȡ�������Ȉ�(zh��)�ЙC(j��)��(g��u)�������������a(ch��n)����
-
�������M�����ɼ������_(d��)�����ϣ���IMU���T�Ԍ�(d��o)���������a�������Ӌ(j��)������(sh��)�r(sh��)����λ�á��ٶȡ��ϵK����x�Ȕ�(sh��)��(j��)��
-
���a(ch��n)����ϵ�y(t��ng)��MES��
-
��(du��)�ӈ�(ch��ng)�����н����a(ch��n)�����Σ��� ����ԭ�� A �Ă}(c��ng)��(k��) Q3 �^(q��)�������b�侀 R2 ��λ����
-
��(sh��)��(j��)������
-
ݔ�룺���� ID��������͡����͕r(sh��)�g����Ŀ�ĵ�����(bi��o)��
-
ݔ�����΄�(w��)��ɠ�B(t��i)����(sh��)�H�ĕr(sh��)��AGV ��̖(h��o)��
-
���g(sh��)��(sh��)�F(xi��n)��ͨ�^ REST API ����Ϣ�(du��)�У��� Kafka����(sh��)�r(sh��)ͬ����֧����(w��)����Ϣ�_��ָ��Gʧ��
-
�}(c��ng)��(ch��)����ϵ�y(t��ng)��WMS��
-
��(du��)�ӈ�(ch��ng)����푑�(y��ng)�����(k��)������ ����؛�� L1-05 ȡ��؛�� X�����\(y��n)���֒��_(t��i) S4����
-
��(sh��)��(j��)������
-
ݔ�룺��(k��)λ����(bi��o)��؛������ / �ߴ硢�����(k��)��ͣ����� / ���㣩��
-
ݔ������(k��)�挍(sh��)�r(sh��)λ�á�AGV ���I(y��)��������؛λ�cӆ�β�������
-
���g(sh��)��(sh��)�F(xi��n)������ WMS �IJ���Ӌ(j��)�����{(di��o)��ϵ�y(t��ng)��ǰҎ(gu��)�� AGV ��Ⱥ�΄�(w��)�������(k��)�^(q��)���¡�
-
��I(y��)�YԴӋ(j��)����ERP��
-
��(du��)�ӈ�(ch��ng)����ͬ��ȫ�֮a(ch��n)��Ҏ(gu��)������ ��Q2 �������a(ch��n) 30%������������Ч�� 25%����
-
��(sh��)��(j��)������
-
ݔ�룺�a(ch��n)��Ŀ��(bi��o)����������Ӌ(j��)����MRP�����O(sh��)���A(y��)�㣻
-
ݔ�������� KPI�����վ����\(y��n)�����O(sh��)�������ʣ���ƿ�i������(b��o)�档
-
���g(sh��)��(sh��)�F(xi��n)��ͨ�^ ETL ���߶���ͬ����(sh��)��(j��)��֧�� BI ��(b��o)���(d��ng)�B(t��i)չʾ�����c���a(ch��n)�ąf(xi��)ͬЧ�ʡ�
-
��(li��n)�W(w��ng)ƽ�_(t��i)��IoT Platform��
-
��(du��)�ӈ�(ch��ng)�������빤�S��(j��) IoT ƽ�_(t��i)����(sh��)�F(xi��n) AGV ȫ�������ڹ�����
-
��(sh��)��(j��)������
-
���У���(sh��)�r(sh��)��ݔ����������̡����ϴ��a��������ԭʼ��(sh��)��(j��)��
-
���У����չ̼�����(j��)ָ�����(sh��)�h(yu��n)���{(di��o)�����������ֵ�������`���ȣ���
-
���g(sh��)��(sh��)�F(xi��n)������ MQTT-SN �f(xi��)�h�����ģ�֧��߅��Ӌ(j��)�㹝(ji��)�c(di��n)�A(y��)̎�픵(sh��)��(j��)�����^�V�oЧ������
-
���܂}(c��ng)��(ch��)�O(sh��)�䣨��Ѷ�C(j��)��ݔ�;���
-
��(du��)�ӈ�(ch��ng)������(g��u)�� ��AGV + ���w��(k��) + �֒����� �Ԅ�(d��ng)���·���� ��AGV ����������ݔ�;�����(j��ng)�֒�������λ؛�ܡ���
-
��(sh��)��(j��)������
-
��̖(h��o)(li��n)��(d��ng)��ͨ�^ IO Ӳ�Ӿ��� Profinet �f(xi��)�hͬ����ͣ��̖(h��o)���� AGV ���_(d��)���g�ڕr(sh��)�|�l(f��)ݔ�;��\(y��n)�У���
-
λ��У��(zh��n)��ͨ�^���S�a�ؘ�(bi��o)�� UWB ��λ���_�� AGV �c�O(sh��)��ӿھ���(zh��n)��(du��)�ӣ��`���5mm����
-
�˙C(j��)�����K�ˣ�HMI/APP��
-
��(du��)�ӈ�(ch��ng)�����������ˆT�R�r(sh��)���A(y��)�{(di��o)�ȣ���o����Ρ��ք�(d��ng)���� AGV����
-
��(sh��)��(j��)������
-
ݔ�룺�˹�ָ��� ��AGV-03 ����ǰ���S�ޅ^(q��)��������(y��u)�ȼ�(j��)�{(di��o)����
-
ݔ������(sh��)�r(sh��)�؈D���΄�(w��)�б����O(sh��)��Ԕ�飨�� AGV ��(d��ng)ǰ�ٶȡ�ʣ���������
-
���g(sh��)��(sh��)�F(xi��n)������ WebGL �_�l(f��)�p�������棬֧�� PC ���c�Ƅ�(d��ng)�ˣ��� PDA���L�������ݙ�(qu��n)��������^(q��)�ֹ���T�c��ͨ�T������
女人高潮视频一区二区,欧美日韩一道精品一区二区绯色,精品一级在线播放,女人天堂在线日本
最新国产精品视频久久
|
色综合久久中文综合网
|
亚洲一级精品在线观看
|
无色码中文字幕亚洲精品
|
在线观看欧美gv视频网站
|
欧美日韩精品高清一区二区
|



