ʲô��agvС܇��agvС܇����ԭ�����ӵģ�ϵ�y����{��agvС܇����������С����agvС܇�Ĺ���ԭ���M��Ԕ����ጡ�AGV���Ԅӌ���С܇������һ�N��늳؞�������b�зǽ��|�����b�úͪ�����ַϵ�y�ğo���{��Ԅӻ����\܇�v����ϵ�y���g�ͮaƷ�ѽ��ɞ��������a���������b�侀���}�������Ԅӻ�ϵ�y����Ҫ�O��ͼ��g��
һ��AGV���P�I���g���lչ�śr
���Ї��⌣�Ҍ�AGV����ϵ�y���Q����Ҫ���}����ǡ���ı�����Where am I?�����������Where am I going?����Ҫȥ�����How can I get there?������ôȥ�������@�������}�w�{�����քe��AGV����ϵ�y�е�������Ҫ���g��AGV�Č�����Navigation����AGV��·��Ҏ����Layout designing����AGV�Č������ƣ�Guidance����
1) �Ŏ�������Magnetic Tape Guidance��
�c늴Ō������������·�����N�Ŏ�����ڵ��������O���پ���ͨ�^�ŸБ���̖���F���������`���Ա��^�ã���׃��U��·���^���ף��Ŏ���O�������У����ˌ�����ʽ���ܭh·�܇��������|�ĸɔ_���Ŏ����ܙCе�p������ˌ����Ŀɿ��������Ӱ��^��
2) ��W������Optical Guidance��
��agvС܇�����·����Ϳ���ճ�Nɫ����ͨ�^���z��C�����ɫ���D����̖�M�к���̎�������F���������`���Ա��^�ã�����·���O�ú������У�����ɫ������Ⱦ�͙Cеĥ�pʮ�����У����h��Ҫ���^�ߣ������ɿ����^������^�͡�
3) ҕ�X������Visual Navigation ��
��AGV���^��ĭh���M�ЈD���R�e�����F�������@��һ�N���о����Č������g����헼��g�ѱ��ٔ����ҵ�܊�����ã����䑪�õ�AGV��߀ֻͣ�����о��У�Ŀǰ߀δ���F���ô���g�Č�����AGV���������D���R�e���g�c���⌧�����g��Y�ό���AGV�����������猧���ľ��_�ԺͿɿ��ԣ����İ�ȫ�ԣ����ܻ���ӛ���R�e�ȶ�������������
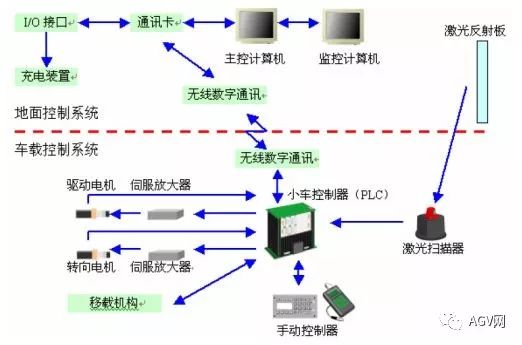
���� AGVϵ�y
AGV����ϵ�y�֞���棨��λ������ϵ�y��܇�d����λ������ϵ�y�����У��������ϵ�yָAGVϵ�y�Ĺ̶��O�䣬��Ҫؓ؟�΄շ��䣬܇�v�{�ȣ�·����������������ͨ�������Ԅӳ�늵ȹ��ܣ�܇�d����ϵ�y���յ���λϵ�y��ָ���ؓ؟AGV�Č���Ӌ�㣬�������F��܇�v���ߣ��bж�����ȹ��ܡ�ϵ�yӲ��������D6-1��ʾ��